Gradient Descent Methods
Prediction 의 gradient descent 로 구현한 알고리즘이 소개 된다.
파라미터들은 컬럼 벡터이며,
는
- '매끄러운'(smooth 무한번 미분 가능한)
- 미분 가능한 (differentiable)
- 에 대한 함수이다.
Updating
아래 식으로 파라미터들을 갱신한다.
식 8.2
- 는 양수 step-size 이다.
- 는 함수 f 에 대한 편미분 벡터이다.
- 이 벡터를 에 대한 f 의 gradient 라고도 한다.
미분 값을 빼서 갱신하므로 경사 하강 기법이다.
사실, step-size 가 시간에 따라 감소해야 수렴성이 보장된다. ( 2.6 Tracking a Nonstationary Problem 의 식 2.7 혹은 2.8 에 대한 내용으로 보인다. )
( 현재 많은 framework 가 있으므로 위의 내용을 실제로 구현할 필요는 없는 것 같다. )
Not Minimal Loss at One Step
위 식이 의미하는 것은 가중치를 조그만(?) 변경 시킨다는 뜻이다.
아래 나오는 알고리즘을 보면, 한 에피소드에서 한 스텝마다 위의 식으로 가중치를 조그만 변경 시킨다.
한 스텝에서 주어진 입출력으로 loss 값을 최소한으로 줄이지 않는다.
위 식의 값 만큼만 아주 조금 loss 가 줄어든다.
책에서는 한 스텝에 loss 를 최소한으로 줄이지 않는 이유가 loss 의 균형 유지 때문이라고 했다.
loss 균형(?) + Convergence (?)
다음은 책 내용이다.
gradient 방향으로 왜 작은 값만으로 를 갱신하는지 바로 인식되지 않을 것이다.
바로 loss 를 최소로 줄이면 안되는지 의문을 품을 수 있다.
많은 경우 loss 를 바로 최소로 줄일 수 있지만, 바람직하지 않다.
모든 상태에서 loss 가 0 인 기대값(value function)을 찾는 것이 목표가 아니고, 다른 상태들의 loss 와 균형을 이루는 추정이 목표다.
( loss 균형이 뭔지 불확실함 )
에피소드의 한 스텝마다 loss를 최소화시키면, 앞서 얘기한 균형(?)을 찾을 수 없다.
( 여기서 갑자기 수렴 조건이 나온다. )
사실, gradient 방법의 수렴성은 시간에 따라 감소하는 step-size 가 필요하다.
그것(?)이 확률적 추정 조건 (2.7) (stochastic approximation conditions ) 을 만족하면서 감소한다면, 지역 최적점에 수렴할 것이다.
Unknown
실제 기대값 는 알 수 없는 값이다. ( 알고리즘으로 점진적으로 추정해야 될 값이다 )
따라서 대신, 현재의 추정치 를 사용해서 parameter 를 갱신한다.
식 8.3
이런 방법을 일반화된 gradient-descent 갱신 ( general gradient-descent update ) 이라고 한다.
Unbiased Estimate (?) And Local Optimum
만약 가 unbiased estimate (?) 이면, 즉, 이면, 는 지역 최적점 (local optimum)에 수렴한다.
다만, step-size 가 감소하는 확률적 추정 조건 ( stochastic approximation conditions 2.7 ? ) 하에서만 보장 되는 듯 하다.
stochastic approximation conditions 는 2.6 Tracking a Nonstationary Problem 에서 언급되어 있다.
Monte Carlo Gradient Descent Convergence (?)
예를 들어, 정책을 사용하여 환경과 상호 작용하여 생성된 상태들이 있다고 가정 한다.
를 각 상태들(을 수행(following)해서 얻은 return (보상들의 합) 이라고 지칭하자.
어떤 상태의 실제 가치(the true value)는 Return 의 기대값이기 때문에,
Monte carlo 의 target ( ) 는 에 대한 바이어스가 없는 추정치이다.
이 선택으로 (with this choice ) 식 8.3 은 지역 최적점에 수렴한다.
따라서 monte carlo state-value prediction 에 대한 gradient descent 는 지역 최적점을 찾는 것이 보장 된다.
DP, TD( ) Gradient Descent No Convergence (?)
비슷하게 , n-step TD Return 들의 평균을 로 볼 수 있다.
예를 들어 TD() 의 gradient descent 는 -return , 을 에 대한 추정치로 사용 한다.
forward view 관점에서 는 아래 식으로 갱신 된다.
식 8.4
불행하게도, 이면 는 바이어스가 있는 의 추정치다.
따라서 식 8.4 는 지역 최적점에 수렴하지 않는다.
DP 도 target 을 로 사용하면, 동일하게 수렴하지 않는다.
그럼에도 불구하고, 이런 bootstrap 방법들은 매우 효율적이고, 다음 챕터에 나올 중요하고 특별한 케이스에서 다른 성능상의 이점이 있다.
지금은, 이 방법들과 gradient descent (식8.3) 형태(?)의 관계만 강조한다. (?)
비록 8.4 의 increments 는 gradient 아니지만, 식 8.3 과 같이 원하는 를 대체하는 bootstrapping 추정 gradient 방법으로 보는게 유용하다.
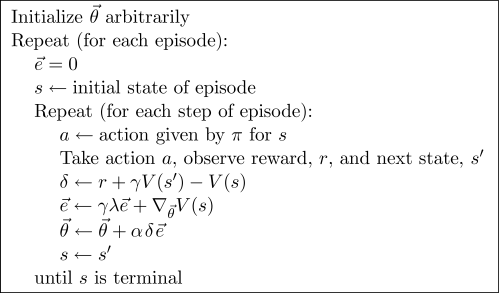
backward view
식 8.4 는 forward view 관점이다.
backward view 는 다음 식으로 볼 수 있다.
식 8.5
는 봤던 TD-error 이다
식 8.6
는 eligibility trace 의 컬럼 벡터이며, 식 8.7 로 갱신된다.
식 8.7
알고리즘 on-line gradient-descent TD()
두 개의 gradient 기반 방법이 강화학습에 많이 사용 된다.
그 중 하나가 다층 인공 신경망이며, 이는 오류 역전파 알고리즘을 사용한다.
두 번째 방법이 선형 방법이며, 다음 챕터에서 다루어진다.