Control with Function Approximation
Action Value Function + Policy Improvement + Selecting Action
- state value function -> action value function
- policy improvement
- selecting action
GPI 의 패턴에 따라, 함수 추정을 사용하는 prediction ( policy evalution ) 방법을 control ( policy improvement ) 방법으로 확장할 것이다.
처음에는 state-value function 을 action value function 으로 확장할 것이며,
이를 policy improvement 와 행동 선택 기법들과 병합할 것이다.
그리고, 지금껏 그래왔듯이, on-policy 또는 off-poilcy 를 통해 다른 정책에 대한 '탐험'을 해결한다. (?)
Extension to Action Value Function
이전에는 상태에 대해 함수 추정을 적용 했지만,
이를 Action Value Function 으로 적용하면, 행동이 추가 된다.
여기서 함수 추정의 target output 인 는
Monte Carlo return 인 되거나 혹은 ,
one step Sarsa-style return 인 가 된다.
General Gradient Descent
Action Value Function 에 대한 Gradient Descent 갱신 방법은 아래와 같다.
Gradient Descent Sarsa ( )
Action-value 방법에 대한 backward 관점에서의 갱신 방법은 아래와 같다.
여기서 는
이며, 는
이며, 초기 벡터 e 는 0 벡터이다.
Policy Improvement & Action Selection
Control 방법을 만들기 위해서, action-value prediction 방법과 policy improvement 기법, 행동 선택 기법을 연동할 것이다.
Only for Small set Actions
행동의 집합이 크거나, 연속적인 행동에 적용 가능한 기법에 대한 알고리즘은 연구중이다.
개별적 행동(불연속적)이고, 이 행동들의 집합이 크지 않다면, 이전 챕터에서 언급된 방법들을 사용할 수 있다.
Greedy Q Action
행동을 선택할 때는, 각 행동들에 대한 들을 구하고, 가장 가치가 좋은 행동을 선택하는 방법이 있으며,
Policy Improvement : off-policy Greedy
Policy Improvement 는 off-policy 방법에서는 estimation policy 를 greedy 하게 변경하고,
on-policy 방법에서는 같은 정책에서 선택되고, off-policy 에서는 임의의 정책에서 선택된다.
Policy Improvement : on-policy -greedy
on-policy 에서는 greedy 등의 방법으로 이루어 진다.
Action from Estimate Policy : on-policy
on-poicy 방법에서 행동은 같은(?) 정책에서 선택 된다.
Action from Behavior Policy : off-policy
off-policy 방법에서 행동은 임의의(?) 정책에서 선택 된다.
Control Algorithms for on-policy and off-policy
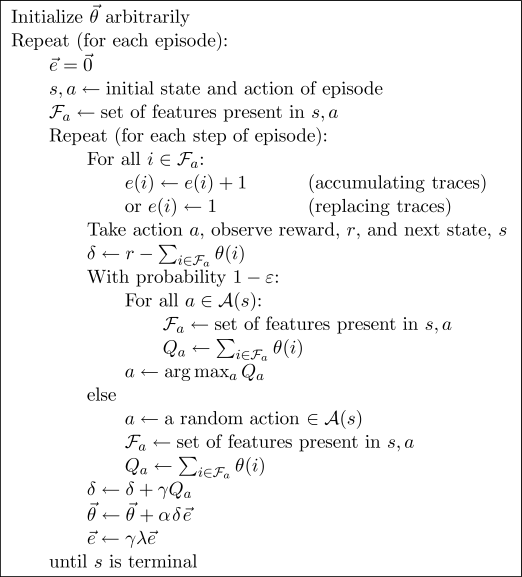
Linear Gradient Descent Sarsa() with binary features -greedy
figure 8.8
gradient descent Q ()
figure 8.9
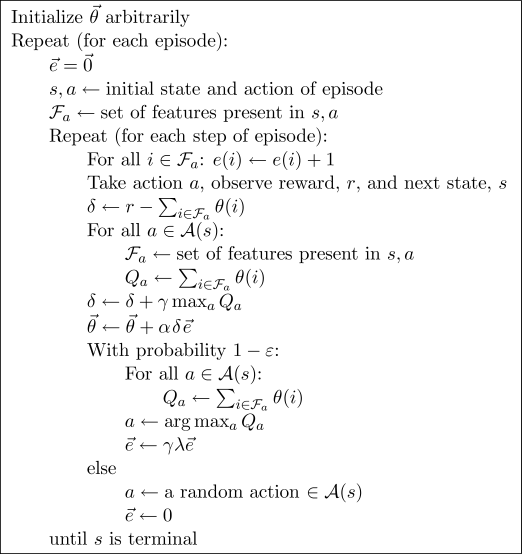
8.8, 8.9 Control Function Approximation
- binary feature
- -greedy policy
그림 8.8 , 8.9 는 on-policy sarsa , off-policy q-learning 의 함수 추정을 사용하는 control 방법이다.
모두 선형 방법이며, tile coding , Kanerva coding 과 같은 이진 feature 를 사용했다.
두 방법 모두 행동을 선택하기 위해 -greedy policy 를 사용 했다.
더욱이 Sarsa 방법은 그것을(?) GPI 를 위해 사용 했다. (?)
두 방법 모두 상태와 가능한 모든 행동들에 대한 present(?) feature 의 집합을 계산했다.
만약 각 행동들에 대한 value function 이 같은 feature 들의 분리된(?) 선형 함수이면, 각 행동들에 대한 의 색인 번호는 같아서 계산 과정을 간단하게 한다. (?)
Replacing Trace with Function Approximation
Replacing Trace : just trace = 1
위에서 언급한 모든 방법은 'accumulating eligibility trace' 를 사용해 왔다.
비록 'replacing trace' 은 table 방법에서 이점이 있다고는 하지만, 함수 추정에 바로 적용하기 어렵다.
replacing trace 는 어떤 상태를 방문할 때마다 trace 값을 1 증가시키는 것이 아니라 그냥 1 로 설정하는 방법이다.
Feature Trace = 1 in Function Approximation
하지만, 함수 추정 방식에서는 각 상태 마다 trace 를 할당 할 수 없고, 다만, 벡터가 여러 상태들을 아우른다.
이진 feature 를 사용하는 선형 경사 하강 방법에서 feature 들을 replacing trace 들을 위한 상태인 것처럼 처리하면, 이를 해결할 수 있다.
이 방법은 i 번째 feature 를 가지고 있는 상태에 도달할 때마다, i 번째 feature 의 trace 를 accumulating trace 방법에서 처럼 1 씩 증가시키는 것이 아니라 1로 설정 하는 것이다.
Init Trace = 0
state-action trace 로 작업시, 선택되지 않은 모든 상태의 행동들의 trace 를 0 으로 설정하는 것이 일반적이다.
이 또한 이진 feature 를 사용하는 함수 추정 방식으로 확장할 수 있다.
먼저, 어떤 상태에 도달하면, 선택되지 않은 상태와 행동들에 대한 feature 의 trace 를 0으로 설정하고, 선택된 상태와 행동들에 대한 feature 의 trace 를 1 로 설정한다.
테이블 방식에서 언급한 것처럼 이 방식이 replacing trace 를 사용할 때 최선은 아닐 수 있다.
Sarsa 알고리즘에서 선택되지 않은 행동을 0으로 설정할 수 있는 기능을 포함하여, 두 종류의 trace 에 대한 절차적 상세내용이 그림 8.8 에 주어졌다. (?)
....